Mit 500 km/h durch die Röhre – eidgenössische Präzision und Blomberger Innovation bereiten den Weg für Hochgeschwindigkeits-Transporte der Zukunft
Tatort Zürich. Doch nicht das Bankenviertel, sondern der Campus der Eidgenössischen Technischen Hochschule Zürich steht diesmal im Licht der Öffentlichkeit. Denn hier residiert Swissloop. Der Name steht für ein Innovationsprojekt an der international höchst angesehenen Ausbildungs- und Forschungsstätte.
Ziel ist die Entwicklung innovativer Technologien für schnelle, rohrgebundene Transportsysteme mit Geschwindigkeiten bis zu 1.200 km/h, entsprechend der Hyperloop-Vision des Tesla-Gründers Elon Musk. Geforscht und getüftelt wird dazu weltweit von unterschiedlichen Teams. Einmal im Jahr wird ein großer Wettkampf, die Hyperloop Pod Competition, beim Musk-Unternehmen SpaceX in Los Angeles abgehalten, wo die Teilnehmer demonstrieren, was ihre Gefährte leisten können. Von den ursprünglich rund 1.000 Teams, die sich 2018 am Wettbewerb beteiligten, blieben letztlich nur 18 übrig.

Nachdem das Swissloop-Team 2017 den 3. Platz erreichen konnte, machte man sich 2018 erneut große Hoffnungen auf einen der vorderen Plätze. Doch ein Problem des Motorreglers in der Vakuumröhre vereitelte in letzter Sekunde den erwarteten Sprung aufs Treppchen.
Hanno Kappen, 2018 noch Student der Elektrotechnik an der ETH Zürich, war eines der rund 20 Mitglieder des Studierendenteams, die die Entwicklergruppe 2018 bildeten.
Beschleunigung wie ein Supersportwagen
„Das als Pod bezeichnete Projektfahrzeug muss in der Versuchsröhre von Musks Firma SpaceX innerhalb von wenigen Sekunden auf eine möglichst hohe Geschwindigkeit beschleunigen und rechtzeitig wieder zum Stehen kommen“, erläutert Kappen. Das Rennen der fahrerlosen Pods findet in den USA in einer von SpaceX gebauten „Hypertube“ statt, einer teilevakuierten, 1,25 Kilometer langen Röhre mit einem Durchmesser von 1,8 Metern. Die Fahrzeuge bewegen sich hierbei entlang einer im Boden verankerten, durch die ganze Röhre verlaufenden I-Schiene.
Das Anforderungsprofil erinnert an Dragster-Rennen: Gewinner ist, wer in der zur Verfügung stehenden Distanz die höchste Maximalgeschwindigkeit erreicht – und es gleichzeitig schafft, am Ende der Strecke nicht zu crashen.
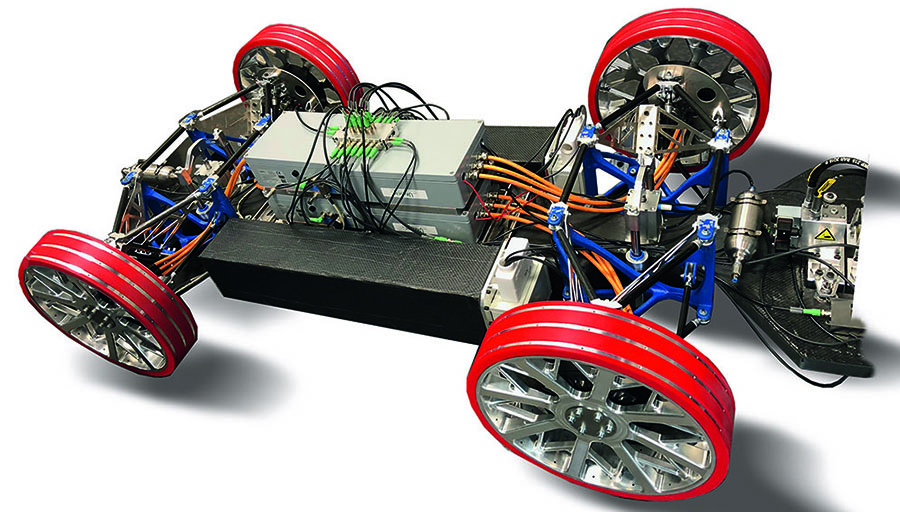
Die Antriebsenergie muss (ohne Verbrennungsmotor) an Bord des Pods erzeugt werden. Bei dem von Swissloop konzipierten Gefährt wird sie von Batterien mit 250 kWh geliefert. Für den Vortrieb sorgen vier Nabenmotoren mit je 110 kW in den Laufrädern, die mit einem speziellen PU-Schaum beschichtet wurden, der die Übertragung hoher Beschleunigungs- und Bremskräfte ermöglicht. 540 PS Gesamtleistung entwickelt der „Mujinga“.
Ziel des Swissloop-Teams war es 2018, eine Geschwindigkeit von rund 500 km/h zu erreichen. Das erfordert eine mittlere Beschleunigung um die 12 m/sec2 – eine Größenordnung, die sonst nur Supersportwagen erreichen.
Hightech in jedem Detail
„Um derartige Werte erreichen zu können, müssen Teams aus verschiedenen Disziplinen eng zusammenarbeiten“, schildert Hanno Kappen. Für den Pod arbeiten Fachleute aus den Bereichen Maschinenbau, Fahrzeugtechnik, Elektrotechnik/Elektronik sowie Hydraulik und Pneumatik zusammen.
Das gesamte Gefährt ist in Ultraleichtbauweise ausgeführt. Das Chassis und zahlreiche weitere Komponenten bestehen aus Leichtbauwerkstoffen wie Carbonfaser oder Aluminium. Bei jedem Bauteil wurde das Gewicht begutachtet und jeder Trick versucht, um an der einen oder anderen Stelle noch ein paar Gramm einzusparen. Nur so ist es möglich, trotz der enormen Leistung das Gesamtgewicht im Bereich von 300 kg zu halten.
E-Flitzer auf Formel-1-Niveau
„Besondere Herausforderungen ergaben sich im Bereich Sensorik, Steuerung und Aktoren“, ergänzt Kappen. Aufgrund der hohen Geschwindigkeit müssen diese Komponenten an den
Grenzen ihrer Möglichkeiten eingesetzt werden. Bei 500 km/h bewirken selbst kleinste Unebenheiten erhebliche Stoßkräfte auf die Räder und die gesamte Mechanik, die blitzschnell kompensiert werden müssen. Achsen, Federung und Dämpfung müssen Formel-1-Anforderungen erfüllen.

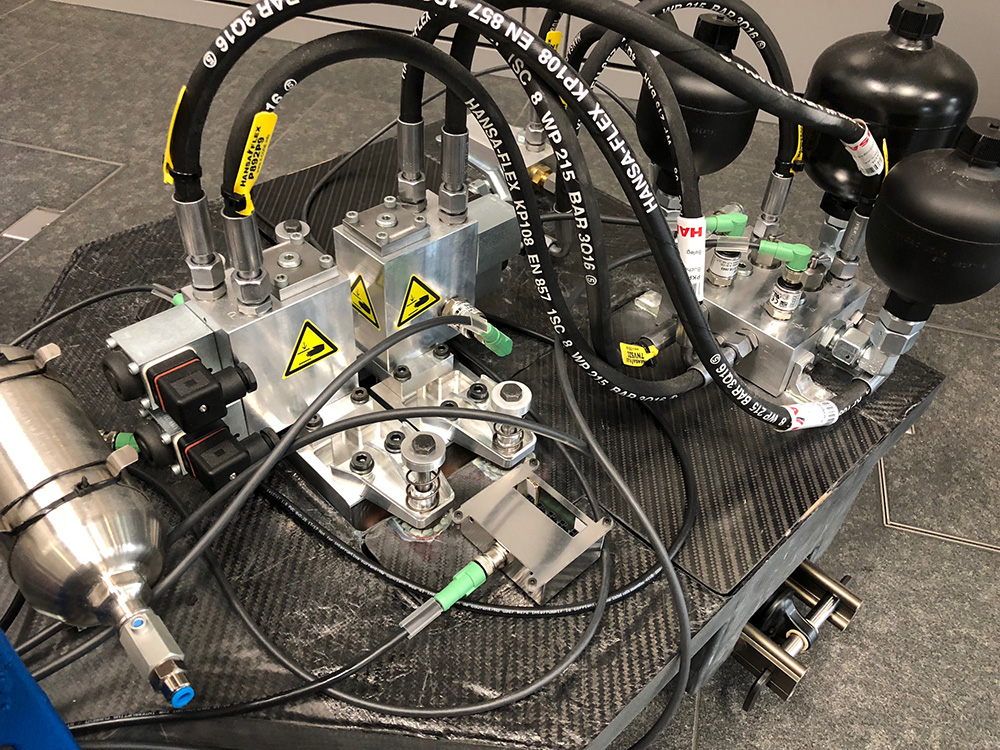
Das Fahrzeug besitzt keine Lenkung. Richtungsänderungen müssen durch minimale Nachjustierung der einzelnen Radantriebe erfolgen. Besonders heikel ist der Kontakt zur I-Schiene, denn dieser erfolgt durch kleine Rollen, und zwar nicht nur seitlich, sondern auch vertikal von unten. Diese Rollen werden über Feder- und Dämpferglieder an die Schiene gedrückt und melden Positionsabweichungen über Sensoren an die Steuerung. Diese muss dann im Millisekundenbereich
reagieren, denn die Toleranzen für Bahnabweichungen sind extrem gering. Zudem müssen die vertikalen Rollen auch noch kontrolliert Andruckkräfte aufbringen, um den vertikalen Neigungswinkel des Fahrzeugs – etwa beim Beschleunigen und Bremsen – zu kontrollieren.
Teamwork mit der Industrie
„Ohne Unterstützung durch zahlreiche Firmen hätten wir dieses Projekt gar nicht durchführen können“, weiß Hanno Kappen. Das galt nicht nur für die zahlreichen Komponenten des Pods, sondern auch für die Beratung bei Auslegung und Einsatz. Infrage kam nur Spitzentechnologie. Seine aus
vier E-Technik-Studenten bestehende Gruppe hatte die Aufgabe, alle im Bereich Energieversorgung und Steuerung entstehenden Herausforderungen zu bewältigen.
Dazu gehörten Batteriemanagement und diverse elektronische Subsysteme bei Sensoren und Aktoren sowie die Auslegung des Verknüpfungsnetzwerks, über das der Daten- und Befehlsfluss zwischen der Steuerung und den zahlreichen Peripherieeinheiten abgewickelt werden muss.
Nervenbahnen in Grün
„Für unsere E-Technik-Gruppe war wertvoll, dass wir mit Phoenix Contact einen Partner für die elektrische Vernetzung gefunden haben, der weltweit für seine Spitzenqualität bekannt ist“, sagt Kappen. Darüber hinaus engagierte sich Phoenix Contact auch mit intensiver Beratung und Unterstützung.
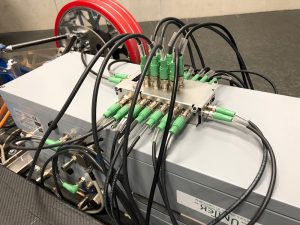
„Es kristallisierte sich heraus, dass sich für diese Aufgabenstellung Rundsteckverbinder im M12-Format am besten eigneten.“ Die mehrpoligen Kabel können bei Bedarf auch selber konfektioniert werden. Hierzu lieferte Phoenix Contact auch gleich das geeignete Kabelmaterial.
Aufgrund des grünen Outfits der Kappen stechen diese „Nervenbahnen“ des Pods optisch hervor, insbesondere bei der von Kappen entwickelten zentralen Netzwerk-Controller-Platine mit ihren insgesamt 20 mehrpoligen Kommunikationsanschlüssen. „Besonders erfreulich war für mich, dass das Unternehmen über seine ortsnahe Schweizer Niederlassung schnelle, unbürokratische und vor allem auch sehr kompetente Hilfestellung geleistet hat“, fasst Hanno Kappen seine Erfahrungen zusammen. Er lebt und arbeitet heute in Los Angeles.
Neuer Anlauf 2019

Die Schmach des technischen Knock-outs 2018 wollen die Akteure der Eidgenössischen Technischen Hochschule Zürich natürlich nicht auf sich sitzen lassen und tüfteln längst an Verbesserungen und einem erneuten Versuch. Im Juli 2019 geht der neue Pod mit Namen „Claude Nicollier“ mit einem neu entwickelten Linearmotor an den Start. Mit hehrem Ziel, denn auch die Schweiz als Land der Tunnel plant eine eigene Version der vakuumierten Hochgeschwindigkeitsröhre. Und das mit passenden Fahrzeugen.
Klaus Vollrath, freier Technik- und Wissenschaftsjournalist